











El LIN (Local Interconnect Network) es un sistema de comunicación en red utilizado principalmente en vehículos para la transmisión de datos entre componentes electrónicos. Es un bus de comunicaciones de bajo costo y baja velocidad, que permite interconectar módulos de control (ECUs) dentro de un automóvil, con el objetivo de compartir información y coordinar acciones entre diversos sistemas del vehículo, como la climatización, el control de ventanas eléctricas, los sensores de puerta, los asientos eléctricos, entre otros.
El desarrollo del LIN se originó en la industria automotriz como una solución complementaria a las redes CAN (Controller Area Network), con el fin de ofrecer una comunicación más económica y sencilla entre dispositivos que no requerían la alta velocidad y complejidad del CAN. A pesar de sus limitaciones en términos de velocidad de transmisión, el LIN sigue siendo una opción viable y ampliamente utilizada en vehículos modernos debido a su bajo costo de implementación y su capacidad para manejar tareas simples pero críticas dentro de la red electrónica del automóvil.
Características y funcionamiento
El protocolo LIN se basa en un modelo maestro-esclavo, en el que un nodo maestro coordina las comunicaciones con varios nodos esclavos. A diferencia de la red CAN, que funciona en un entorno de acceso múltiple, en el sistema LIN solo el maestro tiene la autoridad para controlar el flujo de información, mientras que los esclavos simplemente responden a las solicitudes del maestro.
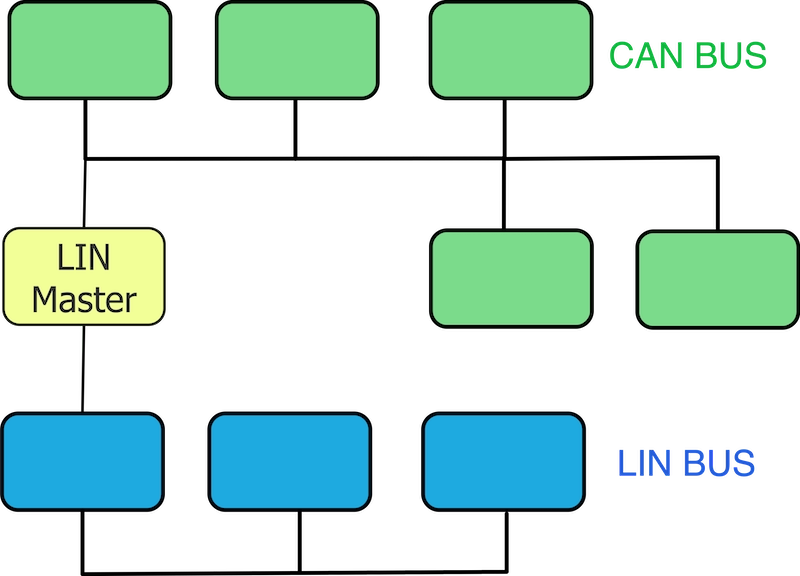
El sistema se organiza bajo una topología de bus, lo que significa que todos los nodos están conectados en serie. Esta estructura simplificada permite que los componentes electrónicos de los vehículos se comuniquen entre sí mediante un único cable de comunicación. El bus LIN generalmente utiliza un solo par de cables, lo que reduce el costo y la complejidad del cableado en comparación con otros sistemas como CAN, que a menudo requieren múltiples cables para la transmisión de datos.
Los nodos dentro de un sistema LIN pueden ser tanto receptores como emisores de información. Sin embargo, solo el nodo maestro puede iniciar las comunicaciones. La transmisión de datos se realiza mediante mensajes, que están organizados en tramas con una estructura bien definida. Cada mensaje contiene información como la dirección del receptor, el identificador del mensaje, y el dato que se está enviando.
Una de las principales características de LIN es su capacidad de sincronización. Los nodos esclavos están sincronizados con el maestro a través de un bit de reloj que se envía con cada mensaje. Esto permite que los nodos esclavos puedan operar de forma coordinada con el maestro, incluso si están ubicados a diferentes distancias a lo largo del bus.
Aplicaciones en la industria automotriz
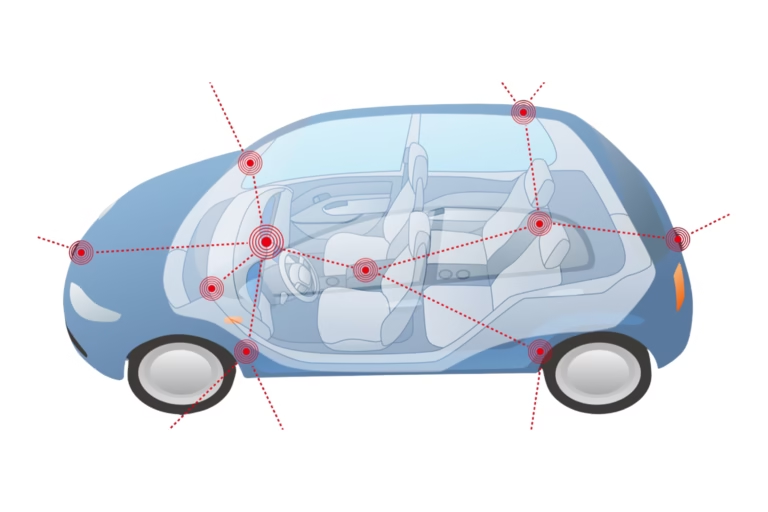
El sistema LIN es comúnmente utilizado para aplicaciones no críticas en cuanto a tiempo y baja velocidad dentro de los vehículos. A menudo, se utiliza en funciones de control secundarias, que no requieren una alta tasa de transferencia de datos, pero que aún necesitan una comunicación eficiente entre módulos. Algunos ejemplos de estas aplicaciones incluyen:
- Control de climatización: Los módulos encargados de la calefacción y el aire acondicionado pueden comunicarse mediante LIN para coordinar la temperatura, la velocidad del ventilador y las funciones de los sistemas de recirculación.
- Sistemas de puertas eléctricas: Los controles de apertura y cierre de puertas, espejos y ventanas también pueden estar gestionados a través de la red LIN.
- Asientos eléctricos: La regulación de la posición de los asientos, los ajustes de inclinación y la memoria de asientos suelen estar controlados por el sistema LIN.
- Luces y retrovisores: El control de faros, espejos retrovisores y otros dispositivos móviles del vehículo puede realizarse utilizando un bus LIN.
- Sensores y módulos de confort: Sensores de temperatura, módulos de seguridad o sistemas de entretenimiento pueden usar LIN para la transmisión de datos no urgentes.
Una de las ventajas principales del uso de LIN en estas aplicaciones es que, al ser un protocolo de baja velocidad, no requiere los elevados costos de implementación de una red más compleja como la de CAN, que está diseñada para soportar aplicaciones de alto rendimiento y alta velocidad, como las relacionadas con el motor, los frenos antibloqueo (ABS) y el control de estabilidad.
Comparación con otras redes de comunicación
Si bien LIN tiene ventajas notables en términos de coste y simplicidad, su capacidad de transmisión de datos es limitada. El protocolo tiene una velocidad de transmisión que varía entre 1 kbit/s y 20 kbit/s, lo cual es mucho más bajo que los 1 Mbit/s que puede alcanzar la red CAN. Sin embargo, la baja velocidad no es un inconveniente para las aplicaciones para las que se destina, como el control de confort, en las cuales la rapidez de transmisión no es un factor crítico.
En términos de robustez, LIN tiene un rendimiento adecuado para aplicaciones de baja velocidad, pero no está diseñado para las demandas más altas de sistemas de control de tiempo real, como lo son los que emplean CAN, que es más adecuado para la transmisión de información crítica y con tiempos de respuesta rápidos. Por lo tanto, LIN y CAN a menudo se emplean de manera complementaria dentro de un vehículo, donde CAN maneja las funciones más críticas y LIN se encarga de las aplicaciones secundarias de control.
Una ventaja adicional del LIN es su costo de implementación, que es considerablemente más bajo que el de CAN. Esto se debe a que los componentes necesarios para una red LIN, como los transceptores y los microcontroladores, son más simples y baratos en comparación con los que se requieren para el protocolo CAN. Además, la simplicidad de la arquitectura del bus LIN reduce los costos de cableado, haciendo que este sistema sea más adecuado para vehículos de gama baja o vehículos que no requieren una red de comunicación compleja.
Diagnóstico y mantenimiento
El diagnóstico y mantenimiento de un sistema LIN en vehículos se realiza a través de herramientas de escaneo que permiten leer los códigos de error generados por los nodos de la red. Estos códigos pueden identificar problemas con las conexiones de los cables, fallos en los módulos esclavos o en el maestro, y otros tipos de fallas de comunicación. Las herramientas de diagnóstico permiten monitorear la actividad de los mensajes, verificar la integridad de las señales y asegurarse de que los módulos estén funcionando correctamente.
Dado que LIN se utiliza principalmente en sistemas que no son críticos para la seguridad, las fallas en el sistema pueden no afectar gravemente el funcionamiento del vehículo. Sin embargo, un fallo en un componente clave de confort, como un sistema de ventanas eléctricas o climatización, podría comprometer la experiencia del usuario.
Conclusión
El LIN (Local Interconnect Network) es un sistema de comunicación robusto y económico que ha encontrado un lugar fundamental en las redes de vehículos modernos, especialmente en aplicaciones no críticas y de baja velocidad. Su simplicidad, bajo costo de implementación y facilidad de diagnóstico lo hacen adecuado para interconectar dispositivos secundarios dentro de los automóviles, como los controles de confort y los sistemas de entretenimiento. Aunque su capacidad de transmisión es limitada en comparación con redes más complejas como CAN, el protocolo LIN sigue siendo una solución eficiente y confiable en la industria automotriz, complementando otros sistemas de comunicación y garantizando una experiencia de usuario mejorada a un costo accesible.